publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2026
- preprint
 An Interpretable Data-Driven Model of the Flight Dynamics of HawksLydia France, Karl Lapo, and J. Nathan KutzarXiv, Feb 2026
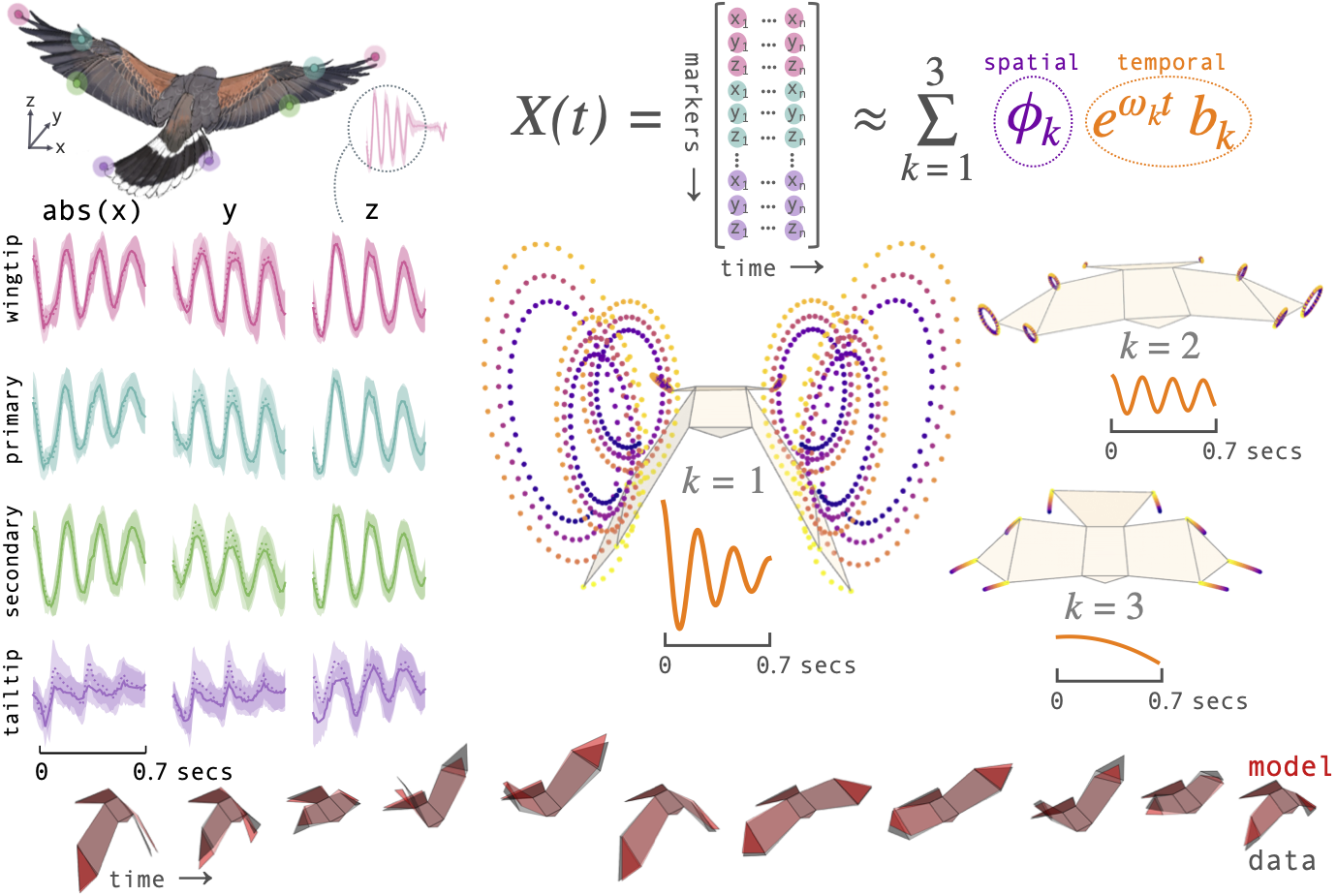
An Interpretable Data-Driven Model of the Flight Dynamics of HawksLydia France, Karl Lapo, and J. Nathan KutzarXiv, Feb 2026Using dynamic mode decomposition on motion capture recordings of hawks, this preprint models behavioural states such as flapping, turning, landing, and gliding through simple and interpretable modal structures that can be linearly combined to reproduce experimental flight observations.
2025
- preprint
 Signatures of Motion: Decomposition of Adaptive Morphing Flight in Harris’ HawksLydia A. France, James Shelton, Marco Klein Heerenbrink, Caroline Brighton, and Graham K. TaylorbioRxiv, Feb 2025
Signatures of Motion: Decomposition of Adaptive Morphing Flight in Harris’ HawksLydia A. France, James Shelton, Marco Klein Heerenbrink, Caroline Brighton, and Graham K. TaylorbioRxiv, Feb 2025Birds outperform engineered aircraft with exceptional maneuverability, achieved by continuously morphing their wings and tails in flight. Yet the coordination and control of these shape changes remain poorly understood. Using high-speed motion capture of Harris’ hawks, we analyzed 289,000 wing-tail configurations in over 2000 flights and identified four fundamental shape change patterns, or "morphing shape modes", that capture over 96% of wing and tail variation. Further modes reflect subtle but critical fine-tuning, in line with known morphing control mechanics. The hawks’ morphing flight is highly structured yet flexible, and we find adaptive strategies in response to obstacles, added weight, with maturity, while each individual shows unique morphing signatures. Our approach defines a shared kinematic morphospace for hawk flight, and more broadly a framework that enables future comparative biomechanics, bio-inspired design, and for interpreting high-dimensional natural motion.
2023
-
 Obstacle Avoidance in Aerial PursuitCaroline H. Brighton, James A. Kempton, Lydia A. France, Marco Kleinheerenbrink, Sofia Minano, and Graham K. TaylorCurrent Biology, Aug 2023
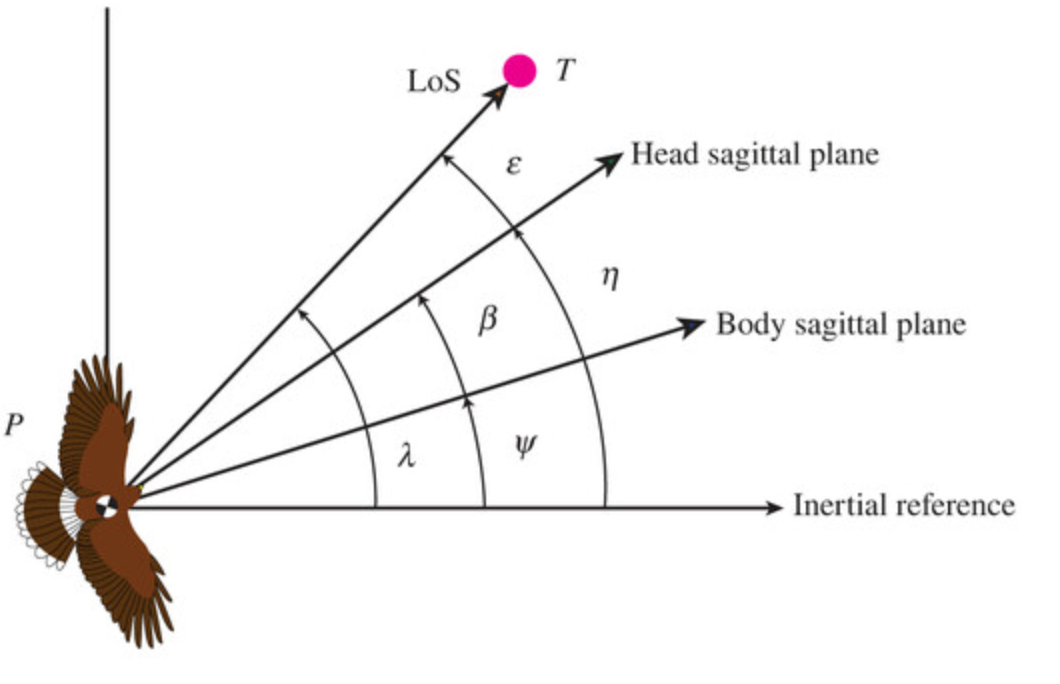
Obstacle Avoidance in Aerial PursuitCaroline H. Brighton, James A. Kempton, Lydia A. France, Marco Kleinheerenbrink, Sofia Minano, and Graham K. TaylorCurrent Biology, Aug 2023Pursuing prey through clutter is a complex and risky activity requiring integration of guidance subsystems for obstacle avoidance and target pursuit. The unobstructed pursuit trajectories of Harris’ hawks Parabuteo unicinctus are well modeled by a mixed guidance law feeding back target deviation angle and line-of sight rate. Here we ask how their pursuit behavior is modified in response to obstacles, using high-speed motion capture to reconstruct flight trajectories recorded during obstructed pursuit of maneuvering targets. We find that Harris’ hawks use the same mixed guidance law during obstructed pursuit but appear to superpose a discrete bias command that resets their flight direction to aim at a clearance of approximately one wing length from an upcoming obstacle as they reach some threshold distance from it. Combining a feedback command in response to target motion with a feedforward command in response to upcoming obstacles provides an effective means of prioritizing obstacle avoidance while remaining locked-on to a target. We therefore anticipate that a similar mechanism may be used in terrestrial and aquatic pursuit. The same biased guidance law could also be used for obstacle avoidance in drones designed to intercept other drones in clutter, or to navigate between fixed waypoints in urban environments.
-
 Visual versus visual-inertial guidance in hawks pursuing terrestrial targetsJames A. Kempton, Caroline H. Brighton, Lydia A. France, Marco KleinHeerenbrink, Sofia Minano, James Shelton, and Graham K. TaylorJournal of the Royal Society Interface, Jun 2023
Visual versus visual-inertial guidance in hawks pursuing terrestrial targetsJames A. Kempton, Caroline H. Brighton, Lydia A. France, Marco KleinHeerenbrink, Sofia Minano, James Shelton, and Graham K. TaylorJournal of the Royal Society Interface, Jun 2023The aerial interception behaviour of falcons is well modelled by a guidance law called proportional navigation, which commands steering at a rate proportional to the angular rate of the line-of-sight from predator to prey. Because the line-of-sight rate is defined in an inertial frame of reference, proportional navigation must be implemented using visual-inertial sensor fusion. By contrast, the aerial pursuit behaviour of hawks chasing terrestrial targets is better modelled by a mixed guidance law combining information on the line-of-sight rate with information on the deviation angle between the attacker’s velocity and the line-of-sight. Here we ask whether this behaviour may be controlled using visual information alone. We use high-speed motion capture to record n = 228 flights from N = 4 Harris’ hawks Parabuteo unicinctus, and show that proportional navigation and mixed guidance both model their trajectories well. The mixed guidance law also models the data closely when visual-inertial information on the line-of-sight rate is replaced by visual information on the motion of the target relative to its background. Although the visual-inertial form of the mixed guidance law provides the closest fit, all three guidance laws provide an adequate phenomenological model of the behavioural data, whilst making different predictions on the physiological pathways involved.
2022
-
 Optimization of Avian Perching ManoeuvresLydia A. France, Marco KleinHeerenbrink, Caroline H. Brighton, and Graham K. TaylorNature, Jul 2022
Optimization of Avian Perching ManoeuvresLydia A. France, Marco KleinHeerenbrink, Caroline H. Brighton, and Graham K. TaylorNature, Jul 2022Perching at speed is among the most demanding flight behaviours that birds perform(1,2) and is beyond the capability of most autonomous vehicles. Smaller birds may touch down by hovering(3-8), but larger birds typically swoop up to perch(1,2)-presumably because the adverse scaling of their power margin prohibits hovering(9) and because swooping upwards transfers kinetic to potential energy before collision(1,2,10). Perching demands precise control of velocity and pose(11-14), particularly in larger birds for which scale effects make collisions especially hazardous(6,15). However, whereas cruising behaviours such as migration and commuting typically minimize the cost of transport or time of flight(16), the optimization of such unsteady flight manoeuvres remains largely unexplored(7,17). Here we show that the swooping trajectories of perching Harris’ hawks (Parabuteo unicinctus) minimize neither time nor energy alone, but rather minimize the distance flown after stalling. By combining motion capture data from 1,576 flights with flight dynamics modelling, we find that the birds’ choice of where to transition from powered dive to unpowered climb minimizes the distance over which high lift coefficients are required. Time and energy are therefore invested to provide the control authority needed to glide safely to the perch, rather than being minimized directly as in technical implementations of autonomous perching under nonlinear feedback control(12) and deep reinforcement learning(18,19). Naive birds learn this behaviour on the fly, so our findings suggest a heuristic principle that could guide reinforcement learning of autonomous perching.
2019
- PhD Thesis
 Mechanics and Control of Perching FlightLydia A. FranceUniversity of Oxford, Jul 2019
Mechanics and Control of Perching FlightLydia A. FranceUniversity of Oxford, Jul 2019Perching is an example of high risk, high reward behaviour executed within tight physical constraints. Despite the high risks posed by collision and stall, perching is performed routinely by most birds. However, surprisingly little is understood about the energetics and control of aerodynamic braking, nor the detail of wing and tail kinematics during perching. In this thesis, detailed wing and tail kinematics were quantified for over 1000 indoor perching flights by Harris hawks using high-speed motion capture. Similar measurements were also taken from 15 outdoor flights by a Steppe eagle, and trajectories were tracked from wild passerines landing on a fixed or oscillating feeder. Aerodynamic braking is typically achieved in raptors through a rapid pitch-up manoeuvre executed at the end of a gliding approach. This manoeuvre produces high drag as predicted by published unsteady aerodynamic models, but unexpectedly the data shows no accompanying peak in lift. The complexity of wing-tail morphing and rotation during the rapid pitch-up manoeuvre points to the careful control of aerodynamic forces during unsteady deep stall. A high degree of variation in the perching manoeuvre was evident in the Steppe eagle flights, likely in response to local air conditions. However the hawk flights were exceedingly consistent under the controlled experimental conditions. Different perch distances were used to induce variation in the hawks’ braking strategy. Braking was achieved in a flapping rather than gliding approach in the shortest flights, although the observed pattern of body pitch-up was consistent across flight distances. Systematic inter-individual variation was recorded in both wing motion and trajectory shape. As a visually-guided flight behaviour, braking is controlled precisely with respect to the target such that the bird may land with low impact force and avoid injuries. Flights from the eagle and hawks show evidence for control of braking in line with the predictions of tau theory: during approach to the perch, both the rate of change in the optic flow variable tau and the rate of deceleration were constant. This was not the case for wild passerines using intermittent flight, although they might still use optic flow in feedback control.